
کنجکاوی (مریخنورد)
.jpg)
 بالا: مریخنورد کنجکاوی در زمین پایین: فرود به سطح مریخ تصویربرداری توسط دوربین هیریس روی مدارگرد شناسایی مریخ | |
| اپراتور | ناسا |
|---|---|
| پیمانکاران عمده | |
| نوع ماموریت | مریخنورد (اکتشافات فضایی)|مریخنورد]] |
| تاریخ راهاندازی | ۲۶ نوامبر ۲۰۱۱ ۱۵:۰۲:۰۰٫۲۱۱ یوتیسی (۱۰:۰۲ EST)[۴][۵] |
| خودرو راهانداز | اتلس وی ۵۴۱ (ایوی-۰۲۸) |
| سایت راهانداز | کیپ کاناورال السی-۴۱[۶] |
| مدت ماموریت | ۶۶۸ مریخی ثلث (۲۳ ماه زمینی) |
| شناسه کاسپار | 2011-070A |
| صفحه خانگی | آزمایشگاه علمی مریخ |
| جرم | ۹۰۰ کیلوگرم (۲٬۰۰۰ پوند)[۷] |
| قدرت | مولد گرما-الکتریکی ایزوتوپی (RTG) |
| فرود مریخ | |
| تاریخ | ۶ اوت ۲۰۱۲، ۰۵:۱۴:۳۹ یوتیسی اسسیایتی[۸] MSD 49269 05:50:16 AMT |
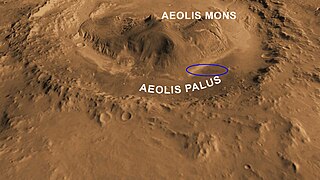
| مختصات | کوه ائولیس در دهانه گیل، ۴°۳۵′۳۱″ جنوبی ۱۳۷°۲۶′۲۵″ شرقی / ۴٫۵۹۱۹۴°جنوبی ۱۳۷٫۴۴۰۲۸°شرقی |


مریخنورد کنجکاوی (به انگلیسی: Curiosity) خودرو مریخنورد است که هماکنون در گودال گیل نزدیکی خط استوا مریخ، در حال کاوش است.[۹]
مشخصات دستگاه[ویرایش]
این کاوشگر پیچیدهترین کاوشگری بود که سازمان فضایی آمریکا، ناسا، به سیاره سرخ (مریخ) فرستاده بود. این خودروی شش-چرخه که ۲٫۹ متر طول و ارتفاعی به اندازه قد یک انسان معمولی و ۹۰۰ کیلوگرم وزن دارد، میتواند بر روی سطح سیاره حرکت کند که حدود چند ده متر در روز است و از موانعی تا ارتفاع ۷۵ سانتیمتر بالا رود و دارای یک باتری پلوتونیوم است که به آن اجازه میدهد تا بیش از ده سال به حرکت ادامه دهد؛ که برای بازدید از همه کفِ دهانه و حتی صعود به قله کوه شارپ در مریخ زمانی کافی است.
این وسیله که مجهز به انواع تجهیزات علمی است، میتواند از خاک نمونه برداری کند و سنگها را سوراخ کند. یک بازوی روباتیک، نمونهها را برای آنالیز ترکیب شیمیایی به آزمایشگاه درون وسیله منتقل میکند.[۱۰]
دوربینها[ویرایش]
- دوربین ناوبری
این خودرو مجهز به دو جفت دوربین ناوبری (NavCams) است که با اسکن کردن سطوح پیش رو به مهندسان ناسا در زمین کمک میکند تا کاوشگر را در جهت درست هدایت کنند. با کمک دوربینهای اجتناب از خطر که در پایین خودرو نصب شدهاند، کاوشگر میتواند بدون برخورد با موانع خطرناک به راه خود ادامه دهد.
- دوربینهای علمی
دوربینهای روی دیرک (MastCams) دوربینهای علمی هستند. آنها میتوانند از سطح مریخ، تصاویر رنگی سه بعدی یا حتی تصاویر ویدئویی تهیه کنند. یکی از دوربینها دارای لنز واید و دیگری دارای لنز تلهفوتو است.
دوربین شیمیایی کیوریاسیتی (ChemCam) میتواند یک پرتو لیزر را از فاصله ۷ متری بر سطحی با قطر کمتر از یک میلیمتر روی یک سنگ بتاباند. این پرتو باعث تولید پلاسما (گازی بسیار داغ) میشود. دوربین شیمیایی این شعله را با یک تلسکوپ مشاهده میکند و با آنالیز نور تولید شده، عناصر شیمیایی موجود در سنگ را تشخیص میدهد. دوربین شیمیایی یک ابزار نقشه برداری نیز هست؛ کارکرد آن در آغاز فرایند انتخاب سنگهای جالب برای مطالعه بیشتر است.
نمونهبرداری[ویرایش]
این کاوشگر در انتهای بازویش یک "دست" دارد که برجک نامیده میشود. برجک دارای یک مته، یک برس برای کنار زدن خاک، یک دوربین برای دید از نزدیک و یک ابزار علمی برای به دست آوردن جزئیات بیشتر در مورد ترکیب شیمیایی سنگها است. دوربین آن، به نام MAHLI، معادل ذرهبین زمینشناسان میدانی است و اطلاعات دقیقی در مورد شکل کریستالها و لایههای معدنی سنگها به دست میدهد.
طیفسنج اشعه ایکس ذرات آلفا (APXS) عناصر شیمیایی موجود در یک سنگ را نمایان میکند و به تصمیمگیری در مورد نیاز به سوراخ کردن سنگ و نمونهبرداری برای مطالعه بیشتر، کمک میکند.
- مته
این کاوشگر از سیستم مته خود برای جمعآوری نمونهها برای بررسی عمقی در آزمایشگاههای درون کاوشگر استفاده میکند. این مته میتواند از سنگها تا عمق پنج سانتیمتر نمونهبرداری کند. مته به سنگ فرو رفته و نمونه را به گردی با درشتی مناسب تبدیل میکند. این گرد از طریق مته به بالا فرستاده میشود تا به بخش پردازش نمونهها منتقل شود. اگر مته در سنگ گیر کند، دستگاه میتواند مته را آزاد کرده و آن را با یک مته جدید جایگزین کند.
آزمایشگاهها[ویرایش]
این کاوشگر دو آزمایشگاه مجهز به همراه خود دارد.
- دستگاه "آنالیز نمونهها در مریخ" (SAM) یک ابزار سهکاره است: یک طیفسنج جرمی، یک کروماتوگراف گازی، و یک طیفسنج لیزری قابل تنظیم که یکی از وظایف اصلی SAM تلاش برای شناسایی ترکیبات کربندار (آلی) است که میتوانند باعث ایجاد حیات شوند و همچنین اندازهگیری میزان هیدروژن، اکسیژن و نیتروژن، عناصر مرتبط با زیستشناسی.
- دستگاه "شیمی و کانیشناسی" (CheMin)، گزارش دقیقی از کانیهای موجود در یک سنگ ارائه میکند.
مأموریت[ویرایش]
مأموریت این کاوشگر یافتن اثر یا آثار حیات در مریخ به وسیلهٔ آنالیز شیمیایی مواد موجود در خاک و سنگهای مریخ است.
برنامهٔ این کاوشگر برای حداقل دو سال فعالیت بر روی سطح مریخ طرح ریزی شده است و انتظار میرود که در این بازهٔ زمانی دهها نمونه خاکبرداری شده از سطح یا سنگهای گودال گیل را آنالیز کند و تا پایان ماموریت اولیه، کاوشگر احتمالاً از مقدار کمی به دامنهٔ کوه شارپ صعود خواهد کرد.
فرود در مریخ[ویرایش]
این کاوشگر در تاریخ ۲۶ نوامبر ۲۰۱۱ توسط ناسا، سازمان فضایی آمریکا به مقصد مریخ پرتاب شد و حدود ۸ ماه بعد در ۶ اوت ۲۰۱۲ بر روی سطح این سیاره فرود آمد. ماموریت این مریخ نورد جستجو برای یافتن نشانههای حیات در سیاره سرخ است.[۱۱] کاوشگر ناسا سفری ۵۶.۳ میلیون کیلومتری را برای رسیدن به مریخ پیمودهاست. پیش از فرود موفقیتآمیز این کاوشگر، نگرانیهای زیادی در این باره وجود داشت، به گونهای که به مرحله فرود آن هفت دقیقه وحشت نام داده بودند.[۱۲] کنجکاوی در گودال گیل در کانون تپهای عظیم فرود آمد. دلیل انتخاب این گودال برای فرود کاوشگر وجود رسوباتی در آن است که بر اثر وجود آب زیاد شکل گرفته است. آنچه به کنجکاوی اجازه میدهد تا شواهدی از وجود نخستین ذرات اساسی در حیات میکروبی را بیابد.[۱۳]

مدیر برنامه و پرواز (flight director) کنجکاوی، بابک فردوسی مهندس ایرانی آمریکایی ناسا بود.[۱۴][۱۵][۱۶]
فرود مریخنورد کنجکاوی، یکی از دشوارترین عملیات فرود فضایی و پیروزی بزرگی برای مهندسان ناسا به شمار میرود، این فرود به علت جو نازک مریخ، خطرات بسیاری داشت، اما با استفاده از چتر و راکتهای پرتابی و بازوهای فضایی سرعت آن از حدود ۲۲ هزار کیلومتر در ساعت آنقدر کاهش یافت که توانست با موفقیت بر سطح مریخ بنشیند.[۱۷] از ۱۴ فضاپیمای بدون سرنشینی که تا کنون از این مرکز فضانوردی به مریخ فرستاده شده، تنها ۶ فروند با موفقیت بر سطح آن نشستهاند. ناسا برای انجام این ماموریت، حدود ۱/۹ میلیارد یورو هزینه کردهاست. زمان ارسال فرمانهای زمینی کنترل به کنجکاوی، ۱۴ دقیقه بهطول میانجامد. در این مدت، این ربات هوشمند بهطور خودکار عمل میکند.[۱۸]
نگارخانه[ویرایش]
- ویدئو
-
مریخنورد کنجکاوی در گودال گیل (۶ اوت ۲۰۱۲).
-
چرخش ۳۶۰ درجه مریخنورد کنجکاوی (۸ اوت ۲۰۱۲).
-
- چرخ
-
 Mast head with ChemCam, MastCam-34, MastCam-100, and NavCam
Mast head with ChemCam, MastCam-34, MastCam-100, and NavCam -
 قطر چرخ مریخ نورد ۵۰ سانتیمتر (۲۰ اینچ) است.
قطر چرخ مریخ نورد ۵۰ سانتیمتر (۲۰ اینچ) است.


- عکسهای گرفته شده توسط مریخنورد کنجکاوی
-

-
 اولین نگاره ارسال شده توسط مریخ نورد کنجکاوری
اولین نگاره ارسال شده توسط مریخ نورد کنجکاوری -
 کنجکاوی ناسا ، اولین نگاره بدون پوشش غبار
کنجکاوی ناسا ، اولین نگاره بدون پوشش غبار -

-
 اولین تصویر رنگی از کنجکاوی
اولین تصویر رنگی از کنجکاوی -
 خودنگاره کنجاوی
خودنگاره کنجاوی -
 مریخنورد کنجکاوی
مریخنورد کنجکاوی -
 لینکولن پنی آمریکا بر سطح مریخ
لینکولن پنی آمریکا بر سطح مریخ -
 چرخهای مریخنورد کنجکاوی
چرخهای مریخنورد کنجکاوی -

-

-

-
 سلفی کاوشگر کنجکاوی
سلفی کاوشگر کنجکاوی













- تصاویر هوائی
-
 چتر هوانوردی کنجکاوی
چتر هوانوردی کنجکاوی -
-

-

-

-

-

-

-

-








_-_HiRISE_-_20120814.jpg)







جستارهای وابسته[ویرایش]
منابع[ویرایش]
- ↑ "MDA designs and builds the Mars Hand-Lens Imager on the Curiosity Rover". Archived from the original on 29 November 2012. Retrieved 7 August 2012.
- ↑ "MDA designs and builds the robotic arm on the Curiosity Rover". Archived from the original on 9 August 2012. Retrieved 7 August 2012.
- ↑ "MDA designs and builds the spectrometer on the Curiosity Rover". Archived from the original on 14 August 2012. Retrieved 7 August 2012.
- ↑ "Curiosity: NASA's Next Mars Rover". NASA. August 6, 2012. Retrieved August 6, 2012.
- ↑ Beutel, Allard (November 19, 2011). "NASA's Mars Science Laboratory Launch Rescheduled for Nov. 26". NASA. Retrieved November 21, 2011.
- ↑ Martin, Paul K. (June 8, 2011). "NASA'S MANAGEMENT OF THE MARS SCIENCE LABORATORY PROJECT (IG-11-019)" (PDF). NASA Office of Inspector General. Archived from the original (PDF) on 3 December 2011. Retrieved August 6, 2012.
- ↑ «Rover Fast Facts». بایگانیشده از اصلی در ۱ سپتامبر ۲۰۱۲. دریافتشده در ۷ اوت ۲۰۱۲.
- ↑ Manaster, Joanne (August 6, 2012). "Video: NASA Lands Car-Sized Rover Near Martian Mountain". ScientificAmerican.com. Retrieved August 6, 2012.
- ↑ http://www.bbc.co.uk/news/science-environment-19145754
- ↑ http://www.bbc.co.uk/persian/science/2012/12/121203_mars_rover_guide.shtml
- ↑ «مریخ نورد جدید آمریکا پس از ۸ ماه به مقصد رسید». بیبیسی فارسی. ۶ اوت ۲۰۱۲. دریافتشده در ۷ اوت ۲۰۱۲.
- ↑ «کاوشگر ناسا بر مریخ نشست». بیبیسی فارسی. ۶ اوت ۲۰۱۲. دریافتشده در ۷ اوت ۲۰۱۲.
- ↑ «فرود «کنجکاوی» بر مریخ و پایان خستگی ناسا». یورونیوز فارسی. ۶ اوت ۲۰۱۲. بایگانیشده از اصلی در ۷ اوت ۲۰۱۲. دریافتشده در ۸ اوت ۲۰۱۲.
- ↑ «بابک فردوسی، مهندس پرواز ایرانی ناسا، مرکز توجه کاربران اینترنت». بیبیسی فارسی. ۶ اوت ۲۰۱۲. دریافتشده در ۶ اوت ۲۰۱۲.
- ↑ «Meet Bobak Ferdowsi, The Flight Director With The Mohawk That Became The Star Of NASA's Curiosity Landing». businessinsider. ۶ اوت ۲۰۱۲. دریافتشده در ۶ اوت ۲۰۱۲.
- ↑ «Mohawks are the surprise winner of the Mars Curiosity landing». گاردین. ۶ اوت ۲۰۱۲. دریافتشده در ۶ اوت ۲۰۱۲.
- ↑ «کیوریاسیتی ارسال تصویر را از مریخ آغاز کرد». صدای آمریکا. ۶ اوت ۲۰۱۲. دریافتشده در ۷ اوت ۲۰۱۲.
- ↑ «فرود موفقیتآمیز فضاپیمای "کنجکاوی" بر سطح مریخ». دویچهوله فارسی. ۶ اوت ۲۰۱۲. دریافتشده در ۷ اوت ۲۰۱۲.
- ↑ Williams، John (اوت ۱۵, ۲۰۱۲). «A 360-degree 'street view' from Mars». PhysOrg. دریافتشده در اوت ۱۶, ۲۰۱۲.
- ↑ Bodrov، Andrew (سپتامبر ۱۴, ۲۰۱۲). «Mars Panorama - Curiosity rover: Martian solar day 2». 360Cities. دریافتشده در سپتامبر ۱۴, ۲۰۱۲.
پیوند به بیرون[ویرایش]
| در ویکیانبار پروندههایی دربارهٔ کنجکاوی (مریخنورد) موجود است. |
- سفری مجازی در سیاره سرخ همراه با کاوشگر کنجکاوی
- پرونده جامع مریخنورد کنجکاوی در «یک پزشک»
- MSL Home Page
- MSL - Landing ("7 Minutes of Terror") - NASA/JPL - Video (05:08) در یوتیوب
- MSL - Landing Site - Gale Crater -Animated/Narrated Video (02:37) در یوتیوب
- MSL - Entry, Descent & Landing (EDL) -Animated Video (02:00)
- MSL - NASA/JPL Virtual Tour - Rover
- Fairly detailed account of the mission at spaceflight101.com
سفرهای فضایی به مریخ | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| امروزه | |||||||||||
| گذشته |
| ||||||||||
| پیشنهادی | |||||||||||
فهرست مأموریتها به مریخ • ماموریتهای ناموفق با حروف کج آمدهاست | |||||||||||
بهرام (مریخ) | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| جغرافیا |
|  | ||||||||||||
| قمرها | ||||||||||||||
| شهابسنگها | ||||||||||||||
| اکتشاف | ||||||||||||||
| گرفتها و گذرشها | ||||||||||||||
| جستارهای دیگر | ||||||||||||||
| سیاستها و پیشینه |
| |||||
|---|---|---|---|---|---|---|
| برنامههای فضاپیمای رباتیک |
| |||||
| برنامههای پرواز فضایی سرنشیندار |
| |||||
| ماموریتهای مستقل برجسته (انسانی و رباتیک) | ||||||
| ارتباطات و ناوبری | ||||||
| فهرستهای ناسا | ||||||
- آزمایشگاه علمی مریخ
- اختراعهای آمریکایی
- اخترزیستشناسی
- کاوش مریخ
- رهیافتهای آنی
- انرژی هستهای در فضا
- پرواز فضایی در ۲۰۱۱ (میلادی)
- پرواز فضایی در ۲۰۱۲ (میلادی)
- چهارگوش ائولیس
- رباتهای ۲۰۱۱ (میلادی)
- کاوشگرهای فضایی پرتابشده در ۲۰۱۱ (میلادی)
- کاوشگرهای فضایی ناسا
- مریخنوردها
- مأموریتهای فضایی اخترزیستشناسی
- فرودهای نرم در مریخ