
سامانه لورنتس

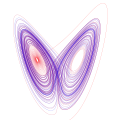
سیستم لورنز (به انگلیسی: Lorenz system) یک سیستم معادلات دیفرانسیل معمولی است که برای اولین بار توسط ادوارد لورنتس و الن فتر مورد بررسی قرار گرفت. برای داشتن راه حلهای برای مقادیر خاص پارامتر و شرایط اولیه نظریه آشوب قابل توجه است. به شکل خاص، جاذب لورنتس مجموعهای از راه حلهای بینظم سیستم لورنتس است. بر پایه مقالات منتشره در رسانههای مشهور، «اثر پروانهای» از پیامدهای واقعی جاذب لورنتس ناشی میشود، یعنی در هر سیستم فیزیکی، در صورت عدم دانش کامل از شرایط اولیه (حتی تغییرات کوچک هوا به دلیل بال زدن پروانه)، عملاً توانایی ما در پیشبینی مسیر آینده آن همیشه شکست خواهد خورد. در این سیستم تأکید میشود که سیستمهای فیزیکی میتوانند کاملاً قطعی باشند و در عین حال حتی در غیاب اثرات کوانتومی نیز ذاتاً قابل پیشبینی نباشند. شکل جاذب لورنتس نیز در صورت ترسیم گرافیکی، ممکن است شبیه یک پروانه باشد.
بررسی اجمالی[ویرایش]

در سال ۱۹۶۳، ادوارد لورنتس، با کمک الن فتر، یک مدل ریاضی ساده برای همرفت جوی ایجاد کرد.[۱] این مدل سیستمی از سه معادله دیفرانسیل معمولی تشکیل شدهاست که اکنون به عنوان معادلات لورنتس شناخته میشوند:
![{\displaystyle {\begin{aligned}{\frac {\mathrm {d} x}{\mathrm {d} t}}&=\sigma (y-x),\\[6pt]{\frac {\mathrm {d} y}{\mathrm {d} t}}&=x(\rho -z)-y,\\[6pt]{\frac {\mathrm {d} z}{\mathrm {d} t}}&=xy-\beta z.\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7928004d58943529a7be774575a62ca436a82a7f)
معادلات لورنتس نیز در مدلهای ساده شده برای لیزر،[۲] مولد الکتریکی،[۳] ترموسیفون،[۴] موتور جریان مستقیم،[۵] مدار الکتریکی،[۶] واکنشهای شیمیایی[۷] و اسمز مستقیم کاربرد دارد.[۸] این معادلات همچنین از معادلات مطرح در فضای فوریه برای چرخ آب مالکوس هستند.[۹][۱۰] چرخ آب مالکوس حرکت آشفتهای را به نمایش میگذارد که در آن به جای چرخش در یک جهت با سرعت ثابت، چرخشی با سرعت متناوب، کندی، توقف، تغییر جهتها و نوسان به جلو و عقب یا ترکیبی از چنین رفتاری را به روشی غیرقابل پیشبینی دارد.
از نظر فنی، سیستم لورنتس غیرخطی، غیر دوره ای، سه بعدی و قطعی است. معادلات لورنتس موضوع صدها مقاله تحقیقاتی و حداقل یک کتاب بودهاست.[۱۱]
تحلیل و بررسی[ویرایش]
به شکل پیشفرض پارامترها ، ، و مثبت هستند لورنتس از مقادیر ، و استفاده کرد. این سیستم رفتارهای آشفتهای را برای این مقادیر (و نزدیک به آن) نشان میدهد.[۱۲]






اگر پس فقط یک نقطه تعادل وجود دارد که در مبدأ است. این نقطه با عدم همرفت مطابقت دارد. همه معادلات زمانی درست است، که عدد یک جاذب جهانی است .[۱۳]

انشعاب چنگال در ، و برای دو نقطه مهم اضافی در: و اینها مربوط به همرفت ثابت هستند. این جفت نقطه تعادل فقط در صورت ثبات است





فقط میتواند مثبت باشد اگر . در مقدار بحرانی، هر دو نقطه تعادل ثبات را از طریق انشعاب هاپ زیر بحرانی از دست میدهند.[۱۴]

هنگامی ، ، و ، سیستم لورنتس دارای نتایج بی نظم است (اما همه نتایج هرج و مرج نیستند). تقریباً تمام نقاط اولیه به یک مجموعه ثابت تغییر میکنند.
تجزیه و تحلیل جاذب لورنتس دشوار است، اما عملکرد معادله دیفرانسیل بر روی جاذب توسط یک مدل هندسی نسبتاً ساده است.[۱۵] اثبات این که واقعاً چنین است چهاردهمین مشکل در لیست مسائل اسمیل است. این مشکل اولین مشکلی بود که توسط وارویک تاکر در سال ۲۰۰۲ حل شد.[۱۶]
برای سایر مقادیر ، این سیستم مدارهای دورانی گره خورده را نمایش میدهد؛ مثلاً با به یک گره توروس تی(۳٬۲) تبدیل میشود.

| راه حلهای نمونه ای از سیستم لورنتس برای مقادیر مختلف ρ | |
|---|---|

|

|
| ρ = ۱۴، σ = ۱۰، β = ۸/۳ | ρ = ۱۳، σ = ۱۰، β = ۸/۳ |

|

|
| ρ = ۱۵، σ = ۱۰، β = ۸/۳ | ρ = ۲۸، σ = ۱۰، β = ۸/۳ |
| برای مقادیر کوچک ρ، سیستم پایدار است و به یکی از دو جاذب نقطه ثابت تبدیل میشود. وقتی ρ از ۲۴٫۷۴ بزرگتر باشد، نقاط ثابت دافعه میشوند و مسیر توسط آنها به روشی کاملاً پیچیده دفع میشود. | |
| وابستگی حساس به شرایط اولیه | ||
|---|---|---|
| زمان t = ۱ | زمان t = ۲ | زمان t = ۳ |

|

|

|
| این ارقام - ساخته شده با استفاده از ρ = ۲۸، σ = ۱۰ و β = ۸/۳ - سه بخش زمانی از تکامل 3-D دو مسیر را نشان میدهد (یکی به رنگ آبی، دیگری به زرد) در جاذب لورنتس با شروع از دو اولیه نقاطی که فقط با ۵-۱۰ در مختصات x متفاوت هستند. در ابتدا به نظر میرسد که این دو مسیر همزمان هستند (فقط یک زرد دیده میشود، زیرا روی یک مسیر آبی کشیده شدهاست) اما پس از مدتی واگرایی واضح است. | ||
شبیهسازیها[ویرایش]
شبیهسازی متلب[ویرایش]
% Solve over time interval [0,100] with initial conditions [1,1,1]
% ''f'' is set of differential equations
% ''a'' is array containing x, y, and z variables
% ''t'' is time variable
sigma = 10;
beta = 8/3;
rho = 28;
f = @(t,a) [-sigma*a(1) + sigma*a(2); rho*a(1) - a(2) - a(1)*a(3); -beta*a(3) + a(1)*a(2)];
[t,a] = ode45(f,[0 100],[1 1 1]); % Runge-Kutta 4th/5th order ODE solver
plot3(a(:,1),a(:,2),a(:,3))
شبیهسازی ریاضیات[ویرایش]
روش استاندارد:
tend = 50;
eq = {x'[t] == σ (y[t] - x[t]),
y'[t] == x[t] (ρ - z[t]) - y[t],
z'[t] == x[t] y[t] - β z[t]};
init = {x[0] == 10, y[0] == 10, z[0] == 10};
pars = {σ->10, ρ->28, β->8/3};
{xs, ys, zs} =
NDSolveValue[{eq /. pars, init}, {x, y, z}, {t, 0, tend}];
ParametricPlot3D[{xs[t], ys[t], zs[t]}, {t, 0, tend}]
کمتر صریح:
lorenz = NonlinearStateSpaceModel[{{σ (y - x), x (ρ - z) - y, x y - β z}, {}}, {x, y, z}, {σ, ρ, β}];
soln[t_] = StateResponse[{lorenz, {10, 10, 10}}, {10, 28, 8/3}, {t, 0, 50}];
ParametricPlot3D[soln[t], {t, 0, 50}]
راه حل تعاملی به صورت پویا:
eqs = {
x'[t] == σ (y[t] - x[t]), y'[t] == x[t] (ρ - z[t]) - y[t], z'[t] == x[t] y[t] - β z[t],
x[0] == 10, y[0] == 10, z[0] == 10
};
tmax = 50;
sol = ParametricNDSolveValue[eqs, Function[t, {x[t], y[t], z[t]}], {t, 0, tmax}, {σ, ρ, β}];
Manipulate[
fun = sol[σ, ρ, β];
plot = ParametricPlot3D[fun[t], {t, 0, tmax}, PlotRange -> All, PerformanceGoal -> "Quality"];
Animate[
Show[plot, Graphics3D[{PointSize[0.05], Red, Point[fun[t]]}]],
{t, 0, tmax}, AnimationRunning -> True, AnimationRate -> 1
],
{{σ, 10}, 0, 100}, {{ρ, 28}, 0, 100}, {{β, 8/3}, 0, 100},
TrackedSymbols :> {σ, ρ, β}
]
شبیهسازی پایتون[ویرایش]
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import odeint
from mpl_toolkits.mplot3d import Axes3D
rho = 28.0
sigma = 10.0
beta = 8.0 / 3.0
def f(state, t):
x, y, z = state # Unpack the state vector
return sigma * (y - x), x * (rho - z) - y, x * y - beta * z # Derivatives
state0 = [1.0, 1.0, 1.0]
t = np.arange(0.0, 40.0, 0.01)
states = odeint(f, state0, t)
fig = plt.figure()
ax = fig.gca(projection="3d")
ax.plot(states[:, 0], states[:, 1], states[:, 2])
plt.draw()
plt.show()
شبیهسازی مدلینگ[ویرایش]
model LorenzSystem
parameter Real sigma = 10;
parameter Real rho = 28;
parameter Real beta = 8/3;
parameter Real x_start = 1 "Initial x-coordinate";
parameter Real y_start = 1 "Initial y-coordinate";
parameter Real z_start = 1 "Initial z-coordinate";
Real x "x-coordinate";
Real y "y-coordinate";
Real z "z-coordinate";
initial equation
x = x_start;
y = y_start;
z = z_start;
equation
der(x) = sigma*(y-x);
der(y) = rho*x - y - x*z;
der(z) = x*y - beta*z;
end LorenzSystem;
شبیهسازی جولیا[ویرایش]
using DifferentialEquations, ParameterizedFunctions, Plots
lorenz = @ode_def begin # define the system
dx = σ * (y - x)
dy = x * (ρ - z) - y
dz = x * y - β*z
end σ ρ β
u0 = [1.0,0.0,0.0] # initial conditions
tspan = (0.0,100.0) # timespan
p = [10.0,28.0,8/3] # parameters
prob = ODEProblem(lorenz, u0, tspan, p) # define the problem
sol = solve(prob) # solve it
plot(sol, vars = (1, 2, 3)) # plot solution in phase space - variables ordered with 1 based indexing
شبیهسازی ماکسیما[ویرایش]
load(dynamics)$
load(draw)$
/* System parameters */
a: 10; b: 8/3; r: 28;
lorenzSystem: [a*(y-x), -x*z+r*x-y, x*y-b*z];
dependentVariables: [x, y, z]$
initialValues: [1, 1, 1]$
timeRange: [t, 0, 50, 0.01]$
/* solution via 4th order Runge-Kutta method */
systemSolution: rk(lorenzSystem, dependentVariables, initialValues, timeRange)$
solutionPoints: map(lambda([x], rest(x)), systemSolution)$
draw3d(point_type=none, points_joined=true, color=blue,
xlabel="x(t)", ylabel="y(t)", zlabel="z(t)",
points(solutionPoints));
استخراج معادلات لورنتس به عنوان مدلی برای همرفت جوی[ویرایش]
معادلات لورنتس از تقریب بوسینسک (شناوری) به معادلات توصیف گردش سیال در یک لایه کم عمق مایع مشتق شدهاست، هنگامی مایع از پایین بهطور یکنواخت گرم میشود و از بالا بهطور یکنواخت سرد میشود.[۱] این گردش سیال به همرفت ریلی–بنارد معروف است. مفروض است که مایع در دو بعد (عمودی و افقی) با شرایط مرزی مستطیلی شکل گردش میکند.[۱۷]
مشارکتها[ویرایش]
لورنتس مشارکتهای الن فتر را در مقاله خود، که مسئول شبیهسازیهای عددی و ارقام است، تأیید میکند.[۱] همچنین، مارگارت همیلتون در محاسبات عددی اولیه و منجر به یافتههای مدل لورنتس کمک کرد.[۱۸]
نگارخانه[ویرایش]
-
 یک راه حل در جاذب لورنز با وضوح بالا در صفحه xz رسم شدهاست.
یک راه حل در جاذب لورنز با وضوح بالا در صفحه xz رسم شدهاست. -
 یک راه حل در جاذبههای لورنز به عنوان SVG ارائه شدهاست.
یک راه حل در جاذبههای لورنز به عنوان SVG ارائه شدهاست. -
انیمیشنی که مسیرهای مختلفی را در سیستم لورنز نشان میدهد.
-
 یک راه حل در جاذب لورنز به عنوان یک سیم فلزی برای نشان دادن جهت و ساختار سه بعدی ارائه شدهاست.
یک راه حل در جاذب لورنز به عنوان یک سیم فلزی برای نشان دادن جهت و ساختار سه بعدی ارائه شدهاست. -
انیمیشنی که واگرایی راه حلهای نزدیک به سیستم لورنز را نشان میدهد.
-
 تصویری از جاذب لورنز در نزدیکی یک چرخه متناوب.
تصویری از جاذب لورنز در نزدیکی یک چرخه متناوب. -
 دو خط ساده در سیستم لورنز ، از rho = ۰ تا rho = ۲۸ (سیگما = ۱۰ ، بتا = ۸/۳)
دو خط ساده در سیستم لورنز ، از rho = ۰ تا rho = ۲۸ (سیگما = ۱۰ ، بتا = ۸/۳) -
 انیمیشن یک سیستم لورنز با وابستگی روحی
انیمیشن یک سیستم لورنز با وابستگی روحی





.gif)
پانویس[ویرایش]
- ↑ ۱٫۰ ۱٫۱ ۱٫۲ (Lorenz 1963)
- ↑ (Haken 1975)
- ↑ (Knobloch 1981)
- ↑ (Gorman، Widmann و Robbins 1986)
- ↑ (Hemati 1994)
- ↑ (Cuomo و Oppenheim 1993)
- ↑ (Poland 1993)
- ↑ (Tzenov 2014)[نیازمند منبع]
- ↑ (Kolář و Gumbs 1992)
- ↑ (Mishra و Sanghi 2006)
- ↑ (Sparrow 1982)
- ↑ (Hirsch، Smale و Devaney 2003), pp. 303–305
- ↑ (Hirsch، Smale و Devaney 2003), pp. 306+307
- ↑ (Hirsch، Smale و Devaney 2003), pp. 307+308
- ↑ Guckenheimer, John; Williams, R. F. (1979-12-01). "Structural stability of Lorenz attractors". Publications Mathématiques de l'Institut des Hautes Études Scientifiques. 50 (1): 59–72. doi:10.1007/BF02684769. ISSN 0073-8301.
- ↑ (Tucker 2002)
- ↑ (Hilborn 2000), Appendix C; (Bergé، Pomeau و Vidal 1984), Appendix D
- ↑ (Lorenz 1960)
منابع[ویرایش]
- Bergé, Pierre; Pomeau, Yves; Vidal, Christian (1984). Order within Chaos: Towards a Deterministic Approach to Turbulence. New York: John Wiley & Sons. ISBN 978-0-471-84967-4.
- Cuomo, Kevin M.; Oppenheim, Alan V. (1993). "Circuit implementation of synchronized chaos with applications to communications". Physical Review Letters. 71 (1): 65–68. Bibcode:1993PhRvL..71...65C. doi:10.1103/PhysRevLett.71.65. ISSN 0031-9007. PMID 10054374.
- Gorman, M.; Widmann, P.J.; Robbins, K.A. (1986). "Nonlinear dynamics of a convection loop: A quantitative comparison of experiment with theory". Physica D. 19 (2): 255–267. Bibcode:1986PhyD...19..255G. doi:10.1016/0167-2789(86)90022-9.
- Grassberger, P.; Procaccia, I. (1983). "Measuring the strangeness of strange attractors". Physica D. 9 (1–2): 189–208. Bibcode:1983PhyD....9..189G. doi:10.1016/0167-2789(83)90298-1.
- Haken, H. (1975). "Analogy between higher instabilities in fluids and lasers". Physics Letters A. 53 (1): 77–78. Bibcode:1975PhLA...53...77H. doi:10.1016/0375-9601(75)90353-9.
- Hemati, N. (1994). "Strange attractors in brushless DC motors". IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications. 41 (1): 40–45. doi:10.1109/81.260218. ISSN 1057-7122.
- Hilborn, Robert C. (2000). Chaos and Nonlinear Dynamics: An Introduction for Scientists and Engineers (second ed.). Oxford University Press. ISBN 978-0-19-850723-9.
- Hirsch, Morris W. ; Smale, Stephen; Devaney, Robert (2003). Differential Equations, Dynamical Systems, & An Introduction to Chaos (Second ed.). Boston, MA: Academic Press. ISBN 978-0-12-349703-1.
- Knobloch, Edgar (1981). "Chaos in the segmented disc dynamo". Physics Letters A. 82 (9): 439–440. Bibcode:1981PhLA...82..439K. doi:10.1016/0375-9601(81)90274-7.
- Kolář, Miroslav; Gumbs, Godfrey (1992). "Theory for the experimental observation of chaos in a rotating waterwheel". Physical Review A. 45 (2): 626–637. doi:10.1103/PhysRevA.45.626. PMID 9907027.
- Leonov, G.A.; Kuznetsov, N.V.; Korzhemanova, N.A.; Kusakin, D.V. (2016). "Lyapunov dimension formula for the global attractor of the Lorenz system". Communications in Nonlinear Science and Numerical Simulation. 41: 84–103. arXiv:1508.07498. Bibcode:2016CNSNS..41...84L. doi:10.1016/j.cnsns.2016.04.032.
- Lorenz, Edward Norton (1963). "Deterministic nonperiodic flow". Journal of the Atmospheric Sciences. 20 (2): 130–141. Bibcode:1963JAtS...20..130L. doi:10.1175/1520-0469(1963)020<0130:DNF>2.0.CO;2.
- Mishra, Aashwin; Sanghi, Sanjeev (2006). "A study of the asymmetric Malkus waterwheel: The biased Lorenz equations". Chaos: An Interdisciplinary Journal of Nonlinear Science. 16 (1): 013114. Bibcode:2006Chaos..16a3114M. doi:10.1063/1.2154792. PMID 16599745.
- Pchelintsev, A.N. (2014). "Numerical and Physical Modeling of the Dynamics of the Lorenz System". Numerical Analysis and Applications. 7 (2): 159–167. doi:10.1134/S1995423914020098.
- Poland, Douglas (1993). "Cooperative catalysis and chemical chaos: a chemical model for the Lorenz equations". Physica D. 65 (1): 86–99. Bibcode:1993PhyD...65...86P. doi:10.1016/0167-2789(93)90006-M.
- Saltzman, Barry (1962). "Finite Amplitude Free Convection as an Initial Value Problem—I". Journal of the Atmospheric Sciences. 19 (4): 329–341. Bibcode:1962JAtS...19..329S. doi:10.1175/1520-0469(1962)019<0329:FAFCAA>2.0.CO;2.
- Sparrow, Colin (1982). The Lorenz Equations: Bifurcations, Chaos, and Strange Attractors. Springer.
- Tucker, Warwick (2002). "A Rigorous ODE Solver and Smale's 14th Problem" (PDF). Foundations of Computational Mathematics. 2 (1): 53–117. CiteSeerX 10.1.1.545.3996. doi:10.1007/s002080010018.
- Tzenov, Stephan (2014). "Strange Attractors Characterizing the Osmotic Instability". arXiv:1406.0979v1 [physics.flu-dyn].
- Viana, Marcelo (2000). "What's new on Lorenz strange attractors?". The Mathematical Intelligencer. 22 (3): 6–19. doi:10.1007/BF03025276.
- Lorenz, Edward N. (1960). "The statistical prediction of solutions of dynamic equations" (PDF). Symposium on Numerical Weather Prediction in Tokyo. Archived from the original (PDF) on 23 May 2019. Retrieved 25 December 2020.
برای مطالعهٔ بیشتر[ویرایش]
- G.A. Leonov; N.V. Kuznetsov (2015). "On differences and similarities in the analysis of Lorenz, Chen, and Lu systems" (PDF). Applied Mathematics and Computation. 256: 334–343. doi:10.1016/j.amc.2014.12.132. Archived from the original (PDF) on 8 August 2017. Retrieved 25 December 2020.
پیوند به بیرون[ویرایش]
- "Lorenz attractor"، دانشنامه ریاضیات، EMS Press، ۲۰۰۱ [۱۹۹۴]
- Weisstein, Eric W. "جذب کننده لورنز". MathWorld.
- جذب کننده لورنز توسط راب موریس، پروژه تظاهرات ولفرام.
- معادله لورنز بایگانیشده در ۷ ژوئن ۲۰۰۹ توسط Wayback Machine در planetmath.org
- هرج و مرج همزمان و ارتباطات خصوصی ، با کوین کوومو. اجرای جاذب لورنز در یک مدار الکترونیکی.
- انیمیشن تعاملی Lorenz جذب کننده (به پلاگین Adobe Shockwave نیاز دارید)
- 3D Attractors: برنامه Mac برای تجسم و کشف جذابیت لورنز در ۳ بعد
- Lorenz Attractor در الکترونیکی آنالوگ اجرا شدهاست
- انیمیشن تعاملی Lorenz Attractor (اجرا شده در آدا با GTK +). منابع و قابل اجرا)
- Lorenz Attractor مبتنی بر وب[پیوند مرده] (اجرا شده در JavaScript / HTML / CSS)
- وب مبتنی بر تعامل Lorenz Attractor ساخته شده با یدید